Project Report
by James Monroe, American River College, GIS Program
November 2023
Abstract
Aerial imagery collected by an Unmanned Aerial System (UAS) captured returns in the visible spectrum formed the basis for derived 2-dimensional and 3-dimensional imagery of the existing condition of the historic downtown within the City of Clovis, California. The 939 RGB images with a resolution of 0.013 meters were processed using Drone2Map software (ESRI) to generate true orthographic, digital surface model, digital terrain model, 3D mesh, point cloud, and textured mesh imagery. The generated imagery was converted into web services on ArcGIS Online (AGOL). The root-mean-square (RMS) reprojection error was calculated as an acceptable 0.352. However, while real-time kinematic (RTK) equipment was incorporated into the flight (to enhance the precision of position data derived from the satellite-based positioning system), ground control points were not incorporated.
Introduction
The City of Clovis, California, envisions a revitalization of its small historic downtown, and has commissioned development of the initial elements of mapping and imagery of the area for use in grant proposals, public hearings, and City Council meetings relating to the overall effort. One such element is updated topographic data of the area, which lead to the deployment of a commercial unmanned aerial system (UAS) on April 4, 2023. Using data from the UAS flight, 2-dimensional and 3-dimentional imagery was derived for use by the revitalization team.
Flight Pre-Planning
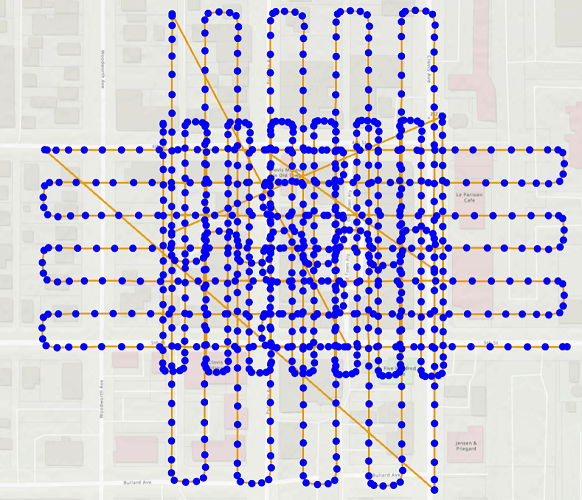
Flight pre-planning involved configuring the flight path by incorporating overlap requirements for the desired accuracy. The blue points represent image centers, and the yellow lines represent flight lines in this image.
Data Processing

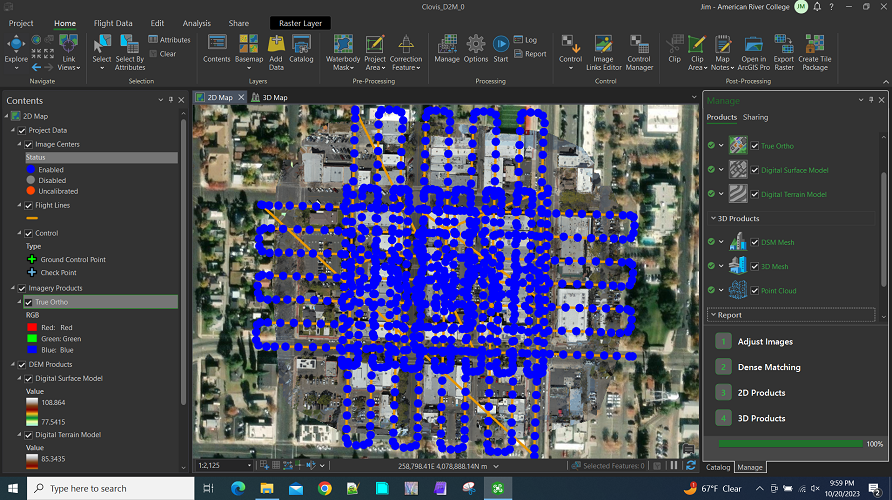
Data processing began with loading the 939 images into Drone2Map software, after configuring the software to produce the 2-dimentional and 3-dimensional products required. The coordinate system for the input UAV images is GCS_WGS_1984, and the output from Drone2Map is WGS_1984_UTM_Zone_11N.
Processing Completion
The completed processing took approximately a day and a half to complete.
Sharing with AGOL

Then the various products generated were shared with AGOL for use in the development of a web application. In the process the geospatial reference of the Drone2Map products was transformed from WGS_1984_UTM_Zone_11N to Web Mercator comply with AGOL basemap standards.
Creating Feature Services on AGOL
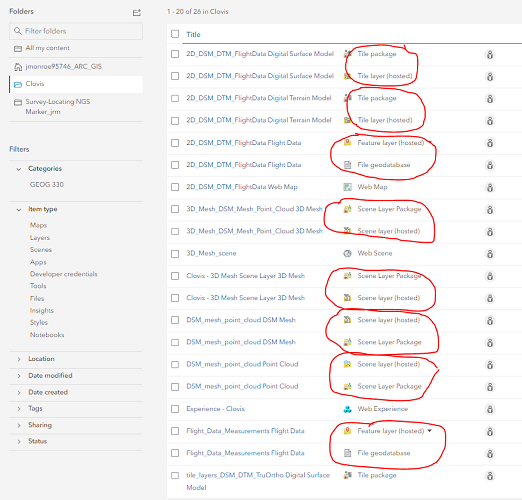
Which resulted in a long list of feature services on AGOL. For each feature shared with AGOL, two files were created.
Imagery Selection
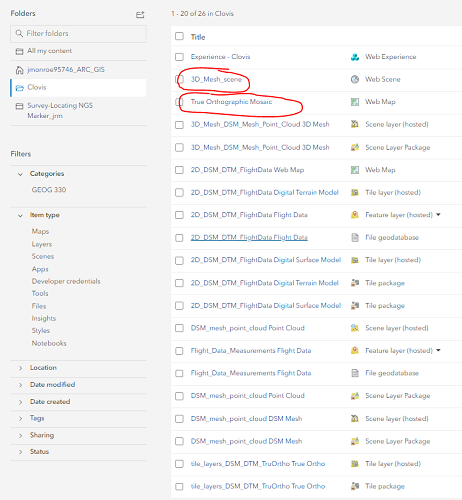
After reviewing all the products listed, two were brought in for further development - the true orthographic mosaic and the 3D Mesh, from which a web map and a web scene, respectively, were created.
Web Map of a True Ortho Mosaic
This true ortho mosaic was first generated in Drone2Map software, then uploaded to AGOL as a feature service, and then a web map was created from that feature service.

The disadvantage of using a web map to deliver content is that users need to use either ArcGIS Pro or Scene Viewer - but the requirement is that the content be viewable via browser.
Web Scene of a 3D Mesh
This 3D Mesh was first generated in Drone2Map software, then uploaded to AGOL as a feature service, and then a web scene was created from that feature service.

The disadvantage of using a web scene to deliver content is that users need to use either ArcGIS Pro or Scene Viewer - but the requirement is that the content be viewable via browser.
Imagery Created In Drone2Map But Not Yet Used
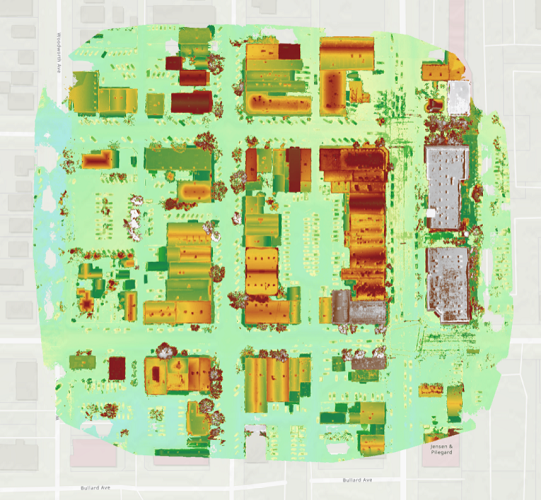
2-dimensional Digital Surface Model (DSM)

2-dimensional Digital Terrain Model (DTM)
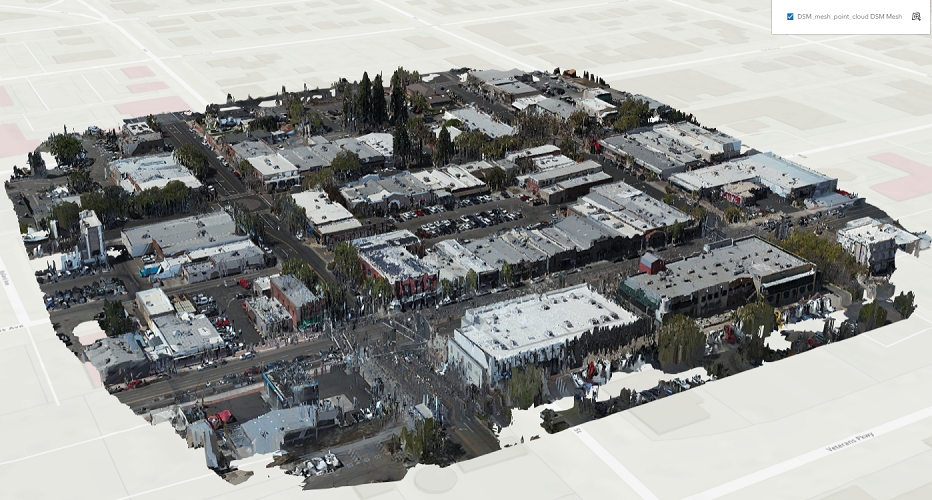
3-dimensional Digital Surface Model Mesh (DSM Mesh)
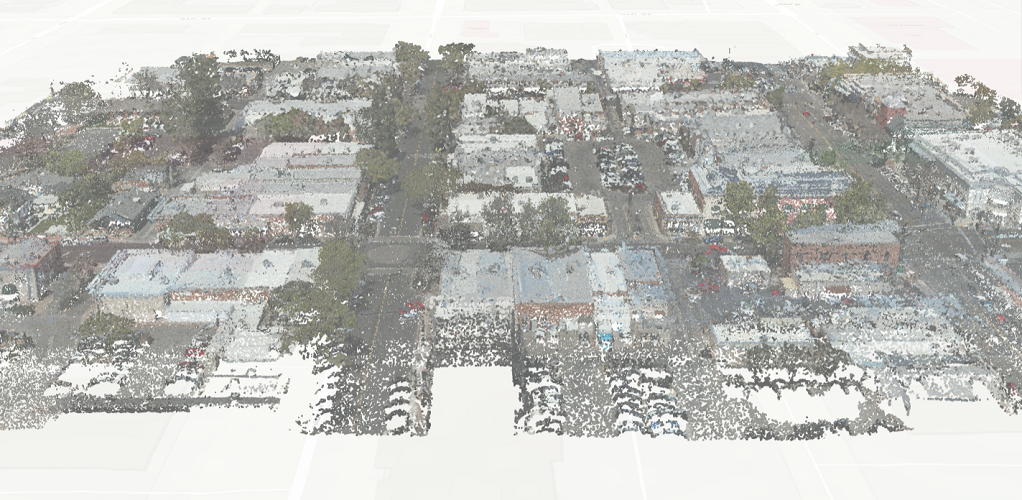
3-dimensional Point Cloud
Source:
Drone2Map Configuration (ESRI): https://doc.arcgis.com/en/drone2map/latest/help/processing-options.htm